|
Каталог
|
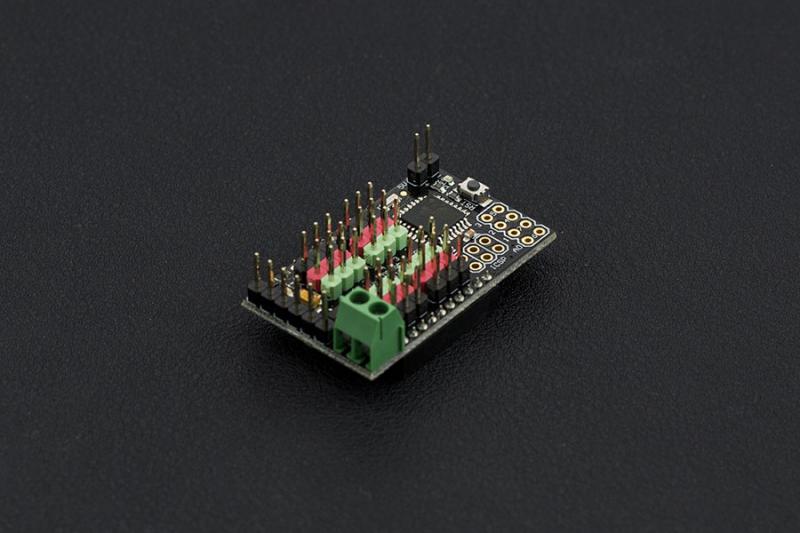
Це напевно найменший Arduino-контролер, спеціально спроектований для управління сервоприводами. Дозволяє управляти дванадцятьма стандартними сервоприводами, має XBee сокет, який може бути використаний в моделі вертольоту або UAV. Маленька вага (всього 7.5 грам) робить його ідеальним для проектів з обмеженим корисним навантаженням. Вбудований регулятор дозволяє підключатися до вхідної напруги 3.5-8В, що забезпечується більшістю джерел живлення. Працює з Arduino IDE як Arduino Mini (потрібен перехідник для підключення до USB з виходом живлення 3.3В. Не використовуйте перехідники з напругою живлення 5В інакше ви можете пошкодити контролер!). В якості бібліотеки рекомендовано використовувати MegaServo Характеристики:
Приклад коду:
#include "MegaServo.h"
#define NBR_SERVOS 12 // the number of servos, up to 48 for Mega, 12 for other boards
#define FIRST_SERVO_PIN 2
MegaServo Servos[NBR_SERVOS] ; // max servos is 48 for mega, 12 for other boards
int pos = 0; // variable to store the servo position
int potPin = 0; // connect a pot to this pin.
void setup()
{
for( int i =0; i < NBR_SERVOS; i++)
Servos[i].attach( FIRST_SERVO_PIN +i, 800, 2200);
}
void loop()
{
pos = analogRead(potPin); // read a value from 0 to 1023
for( int i =0; i
|